Дискриминатор частоты с временным сдвигом квадратурных компонент
|
Дискриминатор частоты с временным сдвигом квадратурных компонент известен в англоязычной литературе как cross-product дискриминатор[1].
Дискриминатор использует отсчеты коррелятора с текущего и предыдущего такта работы:
 ,
,
где
 ,
,
 ,
,
 ,
,
 .
.
Особенности работы

Возможны различные реализация дискриминатора. На рисунке представлено два варианта, условно названных "Перекрытие" и "Перекрытие отсутствует". Поясним рисунок.
Пусть в некоторый момент времени  доступны отсчеты с выхода коррелятора
доступны отсчеты с выхода коррелятора  и отсчеты из предыдущей эпохи
и отсчеты из предыдущей эпохи  . На их основе можно сформировать отсчет дискриминатора
. На их основе можно сформировать отсчет дискриминатора  . Далее возможны варианты.
. Далее возможны варианты.
В случае, если работа идет с "перекрытием", следующий отсчет дискриминатора  будет сформирован из новых отсчетов коррелятора
будет сформирован из новых отсчетов коррелятора  и уже использованных в предыдущем шаге . Таким образом, каждое вычисление отсчета дискриминатора использует отсчеты коррелятора, уже использованные в расчете предыдущего значения дискриминатора. Поэтому шум выхода дискриминатора в данном случае оказывается коррелированным, а его СПМ отличается от СПМ белого шума.
и уже использованных в предыдущем шаге . Таким образом, каждое вычисление отсчета дискриминатора использует отсчеты коррелятора, уже использованные в расчете предыдущего значения дискриминатора. Поэтому шум выхода дискриминатора в данном случае оказывается коррелированным, а его СПМ отличается от СПМ белого шума.
Если дискриминатор работает без "перекрытия", для расчета соседних значений выхода дискриминатора каждый раз используются разные корреляционные суммы. В этом случае, шум дискриминатора будет некорреллированным с равномерной СПМ. Однако, темп работы такого дискриминатора ниже в 2 раза: ему нужно "дождаться" следующей пары отсчетов.
Для дискриминатора "с перекрытием" использование статистического эквивалента вида
 , где
, где 
при моделировании следящих систем недопустимо, т.к. он не отражает корреляционных свойств. Следует воспользоваться статистическими эквивалентами коррелятора.
Дискриминационная характеристика
Сделано допущение, что  .
.

где  ,
,  - амплитуда сигнала
- амплитуда сигнала  ,
,  - количество отчетов, накапливаемых в корреляторе,
- количество отчетов, накапливаемых в корреляторе,  - разность истинного и опорного параметров.
- разность истинного и опорного параметров.
Крутизна дискриминационной характеристики при нулевой расстройке по частоте:  .
.
В модели задержка сигнала полагалась известной:  .
.
Дискриминационная характеристика при различных временах накопления:
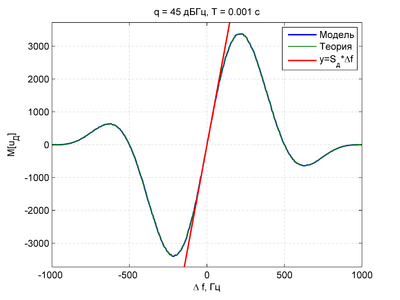
Дискриминационная характеристика при T=1 мс
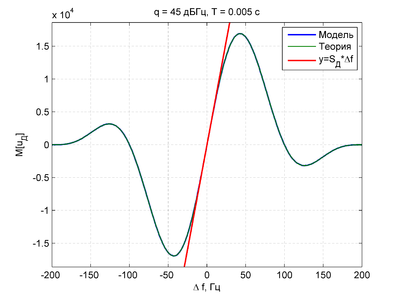
Дискриминационная характеристика при T=5 мс


Флуктуационная характеристика
Получены зависимости СКО шума на выходе дискриминатора от  для различных времен накопления. Теоретические кривые пунктирной линией.
для различных времен накопления. Теоретические кривые пунктирной линией.
_ChD.png)
Дисперсия шума эквивалентного наблюдения частоты, т.е. шума с выхода дискриминатора, пересчитанного к его входу при нулевой расстройке по частоте:

Интересно сравнить дисперсию шумов по входу для разных дискриминаторов. На данный момент у нас есть:
- Собственно дисперсия шума на входе рассматриваемого в этой статье дискриминатора. Обозначим ее как
 :
:

- Дисперсия шума на входе оптимального при низком отношении сигнал/шум частотного дискриминатора (тот, который
 ). Формула из диссера Корогодина И. В., или, например, из этой статьи. Обозначим ее как
). Формула из диссера Корогодина И. В., или, например, из этой статьи. Обозначим ее как  :
:

Вообще говоря, время накопления в корреляторах может быть различно. Если принять равными времена  и
и  , получится что дискриминатору с временным сдвигом квадратур (c ) нужны будут квадратуры, накопленные на суммарном времени
, получится что дискриминатору с временным сдвигом квадратур (c ) нужны будут квадратуры, накопленные на суммарном времени  и разбитые по времени пополам. Для корректности сравнения положим, что во втором дискриминаторе (у которого ) коррелятор копит на времени
и разбитые по времени пополам. Для корректности сравнения положим, что во втором дискриминаторе (у которого ) коррелятор копит на времени  . Разделим на . После нехитрых вычислений окажется, что
. Разделим на . После нехитрых вычислений окажется, что
 , т. е.
, т. е.  или для СКО:
или для СКО: .
.
Таким образом, по дисперсии шумов наблюдается не очень то большая разница между сравниваемыми дискриминаторами. На рисунке ниже приведен график зависимости СКО эквивалентных шумов представленных ЧД от отношения сигнал/шум q_{c/n0}.
convert: no images defined `/tmp/transform_6949e80c1463-1.png' @ error/convert.c/ConvertImageCommand/3044.
Листинг модели
Ниже представлен листинг модели, с которой сняты картинки.
clc
close all
plotDX = 1; %считаем ДХ
plotFX = 0; %считаем дисперсию шумов
if plotDX
N = 3000;
stdn_IQ = 8;
Tc = 0.005;
qcno_dB = 45;
qcno = 10^(qcno_dB/10);
wdop_real = 2*pi*100;
wdop_oporn = [wdop_real-2*pi*(1/Tc):2*pi*(2/Tc)/500:wdop_real + 2*pi*(1/Tc)];
UdFLL = zeros(1, length(wdop_oporn));
A_IQ = stdn_IQ * sqrt(2 * qcno * Tc);
Sd = A_IQ^2*Tc;
for k = 1:N
for j = 1:length(wdop_oporn)
n_I_old = 1*stdn_IQ * randn(1,1);
n_I = 1*stdn_IQ * randn(1,1);
n_Q_old = 1*stdn_IQ * randn(1,1);
n_Q = 1*stdn_IQ * randn(1,1);
phi_real = [pi/3 pi/3 + Tc*wdop_real(1)];
phi_oporn =[pi/4 pi/4 + Tc*wdop_oporn(j)];
m_I_old = A_IQ * sinc((wdop_real(1)-wdop_oporn(j))*Tc/2 /pi)*cos(phi_real(1) - phi_oporn(1) + (wdop_real(1)-wdop_oporn(j))*Tc/2);
m_I = A_IQ * sinc((wdop_real(1)-wdop_oporn(j))*Tc/2 /pi)*cos(phi_real(2) - phi_oporn(2) + (wdop_real(1)-wdop_oporn(j))*Tc/2);
m_Q_old = - A_IQ * sinc((wdop_real(1)-wdop_oporn(j))*Tc/2 /pi)*sin(phi_real(1) - phi_oporn(1) + (wdop_real(1)-wdop_oporn(j))*Tc/2);
m_Q = - A_IQ * sinc((wdop_real(1)-wdop_oporn(j))*Tc/2 /pi)*sin(phi_real(2) - phi_oporn(2) + (wdop_real(1)-wdop_oporn(j))*Tc/2);
I_old = m_I_old + n_I_old;
I = m_I + n_I;
Q_old = m_Q_old + n_Q_old;
Q = m_Q + n_Q;
UdFLL(1, j) = UdFLL(1,j) + I*Q_old - Q*I_old;
end
if ~mod(k, N/10)
fprintf('Progress %d%%\n', k*100/N)
end
end
UdFLL_mean = A_IQ^2*(sinc((wdop_real(1)-wdop_oporn)*Tc/2 /pi)).^2.*sin((wdop_real(1)-wdop_oporn)*Tc);
UdFLL = UdFLL/N;
figure
plot((wdop_real-wdop_oporn)/2/pi,[UdFLL; UdFLL_mean; Sd*(wdop_real-wdop_oporn)]);
ylim([1.1*min(UdFLL_mean) 1.1*max(UdFLL_mean)])
grid on;
xlabel('\Delta f, Гц')
ylabel('M[u_{Д}]')
title(['q = ' num2str(qcno_dB) ' дБГц, T = ' num2str(Tc) ' c'])
end
if plotFX
N = 5000;
stdn_IQ = 8;
Tc = 0.02;
qcno_dB = [10:1:50];
wdop_real = [2*pi*100];
wdop_oporn = [2*pi*100];
D_etta_FLL = zeros(1,length(qcno_dB));
CKO_etta_FLL_teor = nan(1,length(qcno_dB));
for i = 1:length(qcno_dB)
fprintf('qcno_dB = %.0f\n', qcno_dB(i));
qcno = 10^(qcno_dB(i)/10);
A_IQ = stdn_IQ * sqrt(2 * qcno * Tc);
UdFLL = nan(1, N);
for k = 1:N
for j = 1:length(wdop_oporn)
n_I_old = 1*stdn_IQ * randn(1,1);
n_I = 1*stdn_IQ * randn(1,1);
n_Q_old = 1*stdn_IQ * randn(1,1);
n_Q = 1*stdn_IQ * randn(1,1);
phi_real = [pi/3 pi/3 + Tc*wdop_real(1)];
phi_oporn =[pi/4 pi/4 + Tc*wdop_oporn(j)];
m_I_old = A_IQ * sinc((wdop_real(1)-wdop_oporn(j))*Tc/2 /pi)*cos(phi_real(1) - phi_oporn(1) + (wdop_real(1)-wdop_oporn(j))*Tc/2);
m_I = A_IQ * sinc((wdop_real(1)-wdop_oporn(j))*Tc/2 /pi)*cos(phi_real(2) - phi_oporn(2) + (wdop_real(1)-wdop_oporn(j))*Tc/2);
m_Q_old = - A_IQ * sinc((wdop_real(1)-wdop_oporn(j))*Tc/2 /pi)*sin(phi_real(1) - phi_oporn(1) + (wdop_real(1)-wdop_oporn(j))*Tc/2);
m_Q = - A_IQ * sinc((wdop_real(1)-wdop_oporn(j))*Tc/2 /pi)*sin(phi_real(2) - phi_oporn(2) + (wdop_real(1)-wdop_oporn(j))*Tc/2);
I_old = m_I_old + n_I_old;
I = m_I + n_I;
Q_old = m_Q_old + n_Q_old;
Q = m_Q + n_Q;
UdFLL(1, k) = I*Q_old - Q*I_old;
end
end
D_etta_FLL(1,i) = mean((UdFLL - mean(UdFLL)).^2);
CKO_etta_FLL(1,i) = sqrt(D_etta_FLL(1,i));
CKO_etta_FLL_teor(1,i) = sqrt((A_IQ^2*Tc)^2*(1/(qcno*Tc^3))*(1 + 1/(2*qcno*Tc)));
end
figure
plot(qcno_dB, CKO_etta_FLL, 'r*', qcno_dB, CKO_etta_FLL_teor, 'g')
xlabel('q_c/n0, дБГц')
ylabel('\sigma_{вых} ЧД')
grid on
end